Das Elektronik Konzept werden wir vom PLJ Projekt TR 1700 übernehnen, da wir A26 im gleichen Maßstab bauen
Grundgedanken
TR1700 sollte alle positiven Erfahrungen der bisherigen PL-Boote enthalten aber auch viele neue Ideen verwirklichen. Nicht nur die mechanischen Konzeption, sondern auch die elektrischen Seite. Dazu zählen die einzelnen bekannten und neuen Elektronik Baugruppen, Verdrahtungen der Baugruppen und Komponenten sowie das Steckverbinder-System.
Die ersten Entwürfe sahen vor, dass in dem ganzen Boot „fast“ keine Kabel verwendet werden sollten. Lediglich die letzten cm waren hier angedacht. Zur Kiellegung im 3D CAD, war das alles schön anzusehen, doch war die Beschaffung einiger Teile zu diesem Zeitpunkt noch zu teuer.
Heutiges Konzept
Nach einer längeren Pause nahm das Projekt wieder Fahrt auf und so konnte die Elektrische Abteilung das bisherige Konzept neu überarbeiten. Es standen zwei wesentliche Dinge im Vordergrund, ein überarbeiteter Lageregler, das MMI-Board und die Tatsache das es einen Lieferanten gibt, der zu unschlagbar niedrigen Preisen die Leiterplatten fertigen konnte.

Mittels Visio und Excel wurde die komplette elektrische Verdrahtung geplant. Visio dient dabei zur Darstellung der einzelnen Komponenten, Steckern und Elektroniken und deren Lage im Boot. Mit Excel wurde ein Leitungsplan erstellt, der jedes Signal, jeden Stecker und jede Komponente enthält.
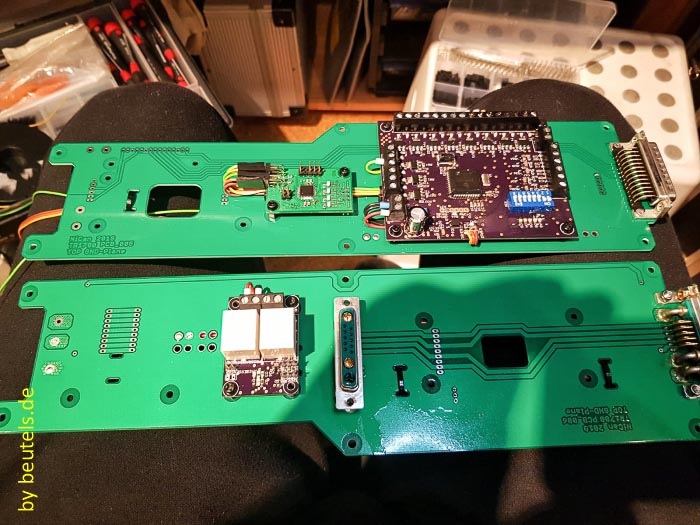
Diese Vorarbeit war notwendig da geplant ist, Leiterplatten als Träger für die Elektronikbaugruppen zu verwenden. So spart man sich die PVC Platten bzw. Epoxyplatten. Gleichzeitig sind diese Leiterplatten mit Leiterbahnen und Steckverbindern ausgerüstet, die die einzelnen Sektoren miteinander verbinden und zwar immer da, wo auch eine mechanische Schnittstelle eingeplant ist. Als Beispiel sei das Heckgerüst genannt, das mittels 4 Schrauben vom Heckkegel getrennt werden kann, ohne das auch nur ein Kabel getrennt werden muss.
Der zweite Entwurf des mechanischen Konzeptes war an einigen Stellen stark vereinfacht, so dass auch das elektrische Konzept vereinfacht wurde. So sind die letzten cm Kabel etwas länger, bzw. zu erst angedachte Leiterplattenverbindungen durch Kabel ersetzt geworden.
Trotz dieser Tatsache, sind die bisher bekannten Flachbandkabel und Messingstangen im Haupttauchtank, komplett durch zwei Leiterplatten ersetzt worden, die beide im Trockenbereich liegen. Dabei sind nicht nur Steckverbinder zum Bug und Heck verwendet worden, sondern auch zur Ausfahrgeräteplatte.
Die Elektronikbaugruppen
Zu den bekannten Elektronikbaugruppen, wie z.B. Kolbentanksteuerung oder Mehrkanalschalter, sind ein paar neue dazu gekommen.
Akku, als Versorgungseinheit für das ganze Boot wird auf die neue LiFePo Technik zurückgegriffen. In Verwendung sind 8 Zellen mit 15Ah. Das ergibt eine 24V Bordspannung. Die Abmessungen des Akkupacks sind aber deutlich kleiner als die bisherigen Blei-Gel-Zellen. Auch wenn nur ca. 80% der Nennkapazität verwendet werden können hat diese Akku- Technologie einen deutlichen Vorteil gegenüber der Blei-Gel-Technologie. Hochstromfest bis zu 150A oder 10C. Schnelladefest bis zu 45A oder 3C wobei für die meisten Ladegeräte schon 1C, also 15A schwer ist. Der Akkupack ist so angeordnet, das er mittels weniger Handgriffe ausgebaut werden kann und auch in anderen Booten Verwendung findet
.Motor und Steller, sind Brushless. Hier war das Hauptproblem, einen Motor zu finden, der bei 24V nur ca. 3000 1/min Umdrehungen an die Schraube anlegt. Der Steller wurde mit der nicht mehr ganz aktuellen, aber für diese Zwecke völlig ausreichenden, Firmware SimonK geflascht. Der Vorteil gegenüber der originalen Firmware, ist das feinere Anpassen der Parameter für Vorwärts- und Rückwärtsbetrieb oder aber auch der Motorbremse beim Umpolen.
Ein-Aus-Schalter. Da das Verdrahtungskonzept keine Möglichkeit der Verpolung zulässt, wurde bei dem Ein-Aus-Schalter auf ein Leistungsrelais verzichtet. Stattdessen arbeitet hier ein Leistungs-MOS-FET. Die Aktivierung geschieht weiterhin über einen Magneten von außen.
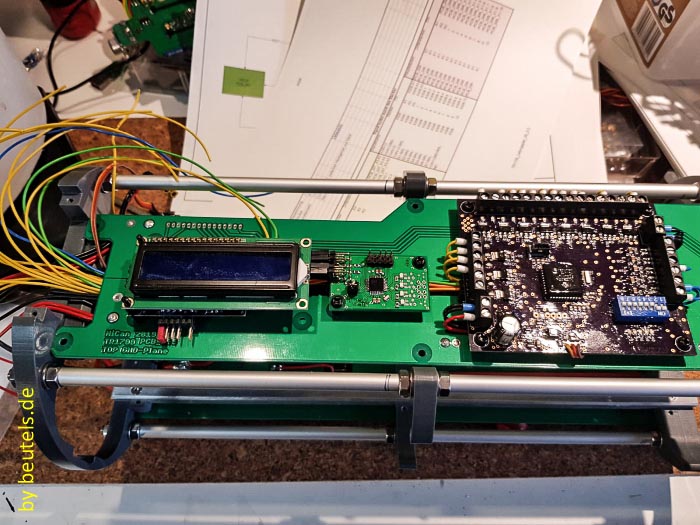
MMI-Board, der Begriff ist schon gefallen. Dabei handelt es sich um eine Weiterentwicklung eine Copter-Steuerung wie sie bei den Coptern und Drohnen Verwendung findet. Eine eigens für U-Boote entwickelte Firmware sorgt für die Lage und Tiefenregelung, aber auch eine Querregelung ist damit möglich. Durch das voll digitale Konzept, lässt sich der Lageregler z.B. auch von Land, über den Sender einstellen, etwas was bei dem analogen Regler immer aufwendig war. Bis zu 9 Servos lassen sich aktivieren und mit diversen Eingangssignalen verknüpfen. Mittlerweile ist das MMI auch in der Lage die 16 Ausgänge des Mehrkanalschalters zu bedienen. Jeder Servo Ausgang ist frei Einstellbar, so dass Failsafe und Servowegbegrenzung frei definierbar sind.
Kolbentanksteuerung. Bewährte Technik von einem Lieferanten, allerdings in einem speziellen Design. So wurden alle Komponenten auf SMD-Technik umgestellt und alle nicht benötigten Schaltungsteile entfernt. Maximale Funktionalität auf kleinstem Raum.
Kompressorkontroll. Die sogenannte KC ist entstanden, da die beiden Kompressoren im Bug sitzen und seit Jahren schon ein echtes Problem beim Anlaufen haben. Einer dieser Kompressoren hat einen Einschaltstromspitze von ca. 24A. Das ist auf dem Bordnetz mit den langen Leitungen eine unschöne Angelegenheit.
Die Grundfunktion der KC ist deswegen einfach zu beschreiben: Die Kompressoren werden nicht einfach eingeschaltet, sondern wie bei einem Antriebsmotor sanft gestartet. Das verhindert die Stromspitze zumal die Kompressoren auch im Leerlauf anlaufen und erst dann auf den Vorratstank mittels Ventil geschaltet werden.
Weitere Funktionen der KC sind im Laufe der Entwicklung dazu gekommen, so werden z.B. sämtliche Eingänge und Sensoren auf Fehler überwacht. Die MKS sendet nur noch ein Signal zur Aktivierung. Analoger Drucksensor, Wassersensor oder eine Schnorchelkopfüberwachung werden von der KC sensiert. Auch der Schnorchelkopf selbst wird von der KC aktiviert. Zeigen alle Signale grünes Licht laufen die Kompressoren an. Sollte einer der Kompressoren während der Laufzeit ausfallen, so wird auch das festgestellt und die KC wechselt in den Notbetrieb.